TR2014-065
Fast Graspability Evaluation on Single Depth Maps for Bin Picking with General Grippers
-
- , "Fast Graspability Evaluation on Single Depth Maps for Bin Picking with General Grippers", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA.2014.6907124, May 2014, pp. 1997-2004.BibTeX TR2014-065 PDF
- @inproceedings{Domae2014may,
- author = {Domae, Y. and Okuda, H. and Taguchi, Y. and Sumi, K. and Hirai, T.},
- title = {{Fast Graspability Evaluation on Single Depth Maps for Bin Picking with General Grippers}},
- booktitle = {IEEE International Conference on Robotics and Automation (ICRA)},
- journal = {IEEE International Conference on Robotics and Automation (ICRA)},
- year = 2014,
- pages = {1997--2004},
- month = may,
- publisher = {IEEE},
- doi = {10.1109/ICRA.2014.6907124},
- url = {https://www.merl.com/publications/TR2014-065}
- }
- , "Fast Graspability Evaluation on Single Depth Maps for Bin Picking with General Grippers", IEEE International Conference on Robotics and Automation (ICRA), DOI: 10.1109/ICRA.2014.6907124, May 2014, pp. 1997-2004.
-
Research Areas:
Abstract:
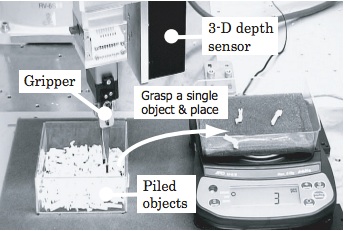
We present a method that estimates graspability measures on a single depth map for grasping objects randomly placed in a bin. Our method represents a gripper model by using two mask images, one describing a contact region that should be filled by a target object for stable grasping, and the other describing a collision region that should not be filled by other objects to avoid collisions during grasping. The graspability measure is computed by convolving the mask images with binarized depth maps, which are thresholded differently in each region according to the minimum height of the 3D points in the region and the length of the gripper. Our method does not assume any 3-D model of objects, thus applicable to general objects. Our representation of the gripper model using the two mask images is also applicable to general grippers, such as multi-finger and vacuum grippers. We apply our method to bin picking of piled objects using a robot arm and demonstrate fast pick-and-place operations for various industrial objects.