Optimization
Efficient solutions to large-scale problems.
Much of MERL's research activity involves formulating scientific and engineering problems as optimizations, which can be solved in an efficient way. We have developed fundamental algorithms to better solve classic problems, such as quadratic programs and minimum-cost paths. Our work also involves developing theoretical bounds to understand performance limits.
Quick Links
-
Researchers

Stefano
Di Cairano

Ankush
Chakrabarty

Arvind
Raghunathan

Toshiaki
Koike-Akino

Daniel N.
Nikovski

Christopher R.
Laughman

Philip V.
Orlik

Yebin
Wang

Ye
Wang

Kieran
Parsons

Devesh K.
Jha

Scott A.
Bortoff

Abraham P.
Vinod

Matthew
Brand

Diego
Romeres

Petros T.
Boufounos

Hassan
Mansour

Pu
(Perry)
Wang
Jianlin
Guo

Avishai
Weiss

Hongbo
Sun

Vedang M.
Deshpande

Dehong
Liu

Hongtao
Qiao

Yanting
Ma

Saviz
Mowlavi

Gordon
Wichern

Purnanand
Elango

Yuki
Shirai

Bingnan
Wang

William S.
Yerazunis

Jinyun
Zhang

Abraham
Goldsmith

Chungwei
Lin

Wataru
Tsujita

Anoop
Cherian

Radu
Corcodel

Pedro
Miraldo

Joshua
Rapp

Alexander
Schperberg

Kenji
Inomata

Na
Li

Jing
Liu
-
Awards
-
AWARD MERL Researchers Win Best Workshop Poster Award at the 2023 IEEE International Conference on Robotics and Automation (ICRA) Date: June 2, 2023
Awarded to: Yuki Shirai, Devesh Jha, Arvind Raghunathan and Dennis Hong
MERL Contacts: Devesh K. Jha; Arvind Raghunathan; Yuki Shirai
Research Areas: Artificial Intelligence, Optimization, RoboticsBrief- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
The paper presents a technique to manipulate an object using a tool in a closed-loop fashion using vision-based tactile sensors. More information about the workshop and the various speakers can be found here https://sites.google.com/view/icra2023embracingcontacts/home.
- MERL's paper titled: "Closed-Loop Tactile Controller for Tool Manipulation" Won the Best Poster Award in the workshop on "Embracing contacts : Making robots physically interact with our world". First author and MERL intern, Yuki Shirai, was presented with the award at a ceremony held at ICRA in London. MERL researchers Devesh Jha, Principal Research Scientist, and Arvind Raghunathan, Senior Principal Research Scientist and Senior Team Leader as well as Prof. Dennis Hong of University of California, Los Angeles are also coauthors.
-
AWARD Arvind Raghunathan receives Roberto Tempo Best CDC Paper Award at 2022 IEEE Conference on Decision & Control (CDC) Date: December 8, 2022
Awarded to: Arvind Raghunathan
MERL Contact: Arvind Raghunathan
Research Areas: Control, OptimizationBrief- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
The award is given annually in honor of Roberto Tempo, the 44th President of the IEEE Control Systems Society (CSS). The Tempo Award Committee selects the best paper from the previous year's CDC based on originality, potential impact on any aspect of control theory, technology, or implementation, and for the clarity of writing. This year's award committee was headed by Prof. Patrizio Colaneri, Politecnico di Milano. Arvind's paper was nominated for the award by Prof. Lorenz Biegler, Carnegie Mellon University, with supporting letters from Prof. Andreas Waechter, Northwestern University, and Prof. Victor Zavala, University of Wisconsin-Madison.
- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
-
AWARD Outstanding Presentation Award at the 28th Conference of Information Processing Society of Japan/Consumer Device & Systems Date: October 20, 2020
Awarded to: Yukimasa Nagai, Takenori Sumi, Jianlin Guo, Philip Orlik, Hiroshi Mineno
MERL Contacts: Jianlin Guo; Philip V. Orlik
Research Areas: Communications, Optimization, Signal ProcessingBrief- MELCO and MERL researchers have won "Outstanding Presentation Award" at 28th Conference of Information Processing Society of Japan (IPSJ)/Consumer Device & Systems held on September 29-30, 2020. The paper titled "IEEE 802.19.3 Standardization for Coexistence of IEEE 802.11ah and IEEE 802.15.4g Systems in Sub-1 GHz Frequency Bands" reports IEEE 802.19.3 standard development on coexistence between IEEE 802.11ah and IEEE 802.15.4g systems in the Sub-1 GHz frequency bands. MERL and MELCO have been leading this standard development and made major technical contributions, which propose methods to mitigate interference in smart meter systems. The authors are Yukimasa Nagai, Takenori Sumi, Jianlin Guo, Philip Orlik and Hiroshi Mineno.
See All Awards for Optimization -
-
News & Events
-
NEWS Yuki Shirai appointed as an Associate Editor for IEEE Robotics and Automation Letters (RA-L). Date: March 4, 2025
Where: IEEE Robotics and Automation Society (RAS)
MERL Contact: Yuki Shirai
Research Areas: Artificial Intelligence, Optimization, RoboticsBrief- MERL researcher, Yuki Shirai, has been appointed to the editorial board of the IEEE Robotics and Automation Letters (RA-L) as an Associate Editor.
IEEE RA-L publishes peer-reviewed articles in the areas of robotics and automation which can also be presented at the annual flagship conferences of IEEE Robotics and Automation Society (RAS), including IEEE International Conference on Robotics and Automation (ICRA) and International Conference on Intelligent Robots and Systems (IROS).
- MERL researcher, Yuki Shirai, has been appointed to the editorial board of the IEEE Robotics and Automation Letters (RA-L) as an Associate Editor.
-
NEWS MERL Papers and Workshops at AAAI 2025 Date: February 25, 2025 - March 4, 2025
Where: The Association for the Advancement of Artificial Intelligence (AAAI)
MERL Contacts: Ankush Chakrabarty; Toshiaki Koike-Akino; Jing Liu; Kuan-Chuan Peng; Diego Romeres; Ye Wang
Research Areas: Artificial Intelligence, Machine Learning, OptimizationBrief- MERL researchers presented 2 conference papers, 2 workshop papers, and co-organized 1 workshop at the AAAI 2025 conference, which was held in Philadelphia from Feb. 25 to Mar. 4, 2025. AAAI is one of the most prestigious and competitive international conferences in artificial intelligence (AI). Details of MERL contributions are provided below.
- AAAI Papers in Main Tracks:
1. "Forget to Flourish: Leveraging Machine-Unlearning on Pretrained Language Models for Privacy Leakage" by M.R.U. Rashid, J. Liu, T. Koike-Akino, Y. Wang, and S. Mehnaz. [Oral Presentation]
This work proposes a novel unlearning-based model poisoning method that amplifies privacy breaches during fine-tuning. Extensive empirical studies show the proposed method’s efficacy on both membership inference and data extraction attacks. The attack is stealthy enough to bypass detection based defenses, and differential privacy cannot effectively defend against the attacks without significantly impacting model utility.
Paper: https://www.merl.com/publications/TR2025-017
2. "User-Preference Meets Pareto-Optimality: Multi-Objective Bayesian Optimization with Local Gradient Search" by J.H.S. Ip, A. Chakrabarty, A. Mesbah, and D. Romeres. [Poster Presentation]
This paper introduces a sample-efficient multi-objective Bayesian optimization method that integrates user preferences with gradient-based search to find near-Pareto optimal solutions. The proposed method achieves high utility and reduces distance to Pareto-front solutions across both synthetic and real-world problems, underscoring the importance of minimizing gradient uncertainty during gradient-based optimization. Additionally, the study introduces a novel utility function that respects Pareto dominance and effectively captures diverse user preferences.
Paper: https://www.merl.com/publications/TR2025-018
- AAAI Workshop Papers:
1. "Quantum Diffusion Models for Few-Shot Learning" by R. Wang, Y. Wang, J. Liu, and T. Koike-Akino.
This work presents the quantum diffusion model (QDM) as an approach to overcome the challenges of quantum few-shot learning (QFSL). It introduces three novel algorithms developed from complementary data-driven and algorithmic perspectives to enhance the performance of QFSL tasks. The extensive experiments demonstrate that these algorithms achieve significant performance gains over traditional baselines, underscoring the potential of QDM to advance QFSL by effectively leveraging quantum noise modeling and label guidance.
Paper: https://www.merl.com/publications/TR2025-025
2. "Quantum Implicit Neural Compression", by T. Fujihashi and T., Koike-Akino.
This work introduces a quantum counterpart of implicit neural representation (quINR) which leverages the exponentially rich expressivity of quantum neural networks to improve the classical INR-based signal compression methods. Evaluations using some benchmark datasets show that the proposed quINR-based compression could improve rate-distortion performance in image compression compared with traditional codecs and classic INR-based coding methods.
Paper: https://www.merl.com/publications/TR2025-024
- AAAI Workshops Contributed by MERL:
1. "Scalable and Efficient Artificial Intelligence Systems (SEAS)"
K.-C. Peng co-organized this workshop, which offers a timely forum for experts to share their perspectives in designing and developing robust computer vision (CV), machine learning (ML), and artificial intelligence (AI) algorithms, and translating them into real-world solutions.
Workshop link: https://seasworkshop.github.io/aaai25/index.html
2. "Quantum Computing and Artificial Intelligence"
T. Koike-Akino served a session chair of Quantum Neural Network in this workshop, which focuses on seeking contributions encompassing theoretical and applied advances in quantum AI, quantum computing (QC) to enhance classical AI, and classical AI to tackle various aspects of QC.
Workshop link: https://sites.google.com/view/qcai2025/
- MERL researchers presented 2 conference papers, 2 workshop papers, and co-organized 1 workshop at the AAAI 2025 conference, which was held in Philadelphia from Feb. 25 to Mar. 4, 2025. AAAI is one of the most prestigious and competitive international conferences in artificial intelligence (AI). Details of MERL contributions are provided below.
See All News & Events for Optimization -
-
Research Highlights
-
Internships
-
MS0102: Internship - Estimation and Calibration of Multi-physical Systems Using Experiments
MERL is looking for a highly motivated and qualified candidate to work on estimation and calibration of muti-physical systems governed by differential algebraic equations (DAEs). The research will involve study, development and efficient implementation of estimation/calibration approaches for large-scale nonlinear systems, e.g., vapor compression cycles, with limited experimental data. The ideal candidate will have a strong background in one or multiple of the following topics: nonlinear control and estimation, optimization, and model calibration; with expertise demonstrated via, e.g., peer-reviewed publications. Prior experience in working with experimental data, and programming in Julia/Modelica is a plus. Senior PhD students in mechanical, electrical, chemical engineering or related fields are encouraged to apply. The typical duration of internship is 3 months, and the start date is flexible.
Required Specific Experience
- Graduate student with 2+ years of relevant research experience
Additional Desired Experience
- Strong programming skills in Julia or Modelica
- Prior experience in working with thermofluid systems
- Prior experience in estimation/calibration of complex nonlinear systems using experimental data
-
EA0149: Internship - Electric Motor Design Optimization
MERL is seeking a motivated and qualified individual to conduct research on physics informed neural network-based modeling for electric motor design optimization. Ideal candidates should be Ph.D. students with solid background and proven publication record in one or more of the following research areas: 2D/3D electromagnetic modeling and simulation, analytical modeling methods for electromagnetics and iron losses (e.g. magnetic equivalent circuit), and machine learning-based surrogate modeling. Strong coding skill with ANSYS or open-source FEM software and Python-based learning library is a must and prior experience with running jobs over cluster is a plus. Start date for this internship is flexible and the duration is 3-6 months.
Required Specific Experience
- Experience with modeling and simulations for motor design
-
CA0117: Internship - Feedforward-Feedback Co-Design
MERL is seeking a graduate student to develop a scalable optimization-based framework for feedforward-feedback co-design for nonlinear dynamical systems subject to path constraints. The framework will 1) support modeling and operational uncertainties, and 2) guarantee static and dynamic feasibility in closed-loop. The solution approach will leverage the state-of-the-art in sequential convex programming, contraction analysis, and first-order methods for semidefinite programming. The methods will be evaluated on high-dimensional motion planning problems in robotics. The results of the internship are expected to be published in top-tier conferences and/or journal in robotics, control systems, and optimization.
The internship is expected to start in Spring or Summer 2025 with an expected duration of 3-6 months depending on the agreed scope and intermediate progress.
Required Specific Experience
- Current/Past enrollment in a Ph.D. program in Mechanical, Aerospace, Electrical Engineering, Computer Science, or Applied Mathematics.
- 2+ years of research in at least some of: first-order algorithms for SDPs, contraction analysis, nonconvex trajectory optimization.
- Strong programming skills in Python and/or C/C++.
See All Internships for Optimization -
-
Openings
-
CA0093: Research Scientist - Control for Autonomous Systems
-
EA0042: Research Scientist - Control & Learning
-
CI0130: Postdoctoral Research Fellow - Artificial General Intelligence (AGI)
-
OR0052: Research Scientist - Optimization Algorithms
See All Openings at MERL -
-
Recent Publications
- , "Simultaneous Trajectory Optimization and Contact Selection for Contact-rich Manipulation with High-Fidelity Geometry", IEEE Transactions on Robotics (T-RO), April 2025.BibTeX TR2025-047 PDF
- @article{Zhang2025apr,
- author = {Zhang, Mengchao and Jha, Devesh K. and Raghunathan, Arvind and Hauser, Kris},
- title = {{Simultaneous Trajectory Optimization and Contact Selection for Contact-rich Manipulation with High-Fidelity Geometry}},
- journal = {IEEE Transactions on Robotics (T-RO)},
- year = 2025,
- month = apr,
- url = {https://www.merl.com/publications/TR2025-047}
- }
- , "Time-Series Generative Networks for Synthesizing Realistic Scenarios in Occupant-Centric Building Simulation", Building Simulation, April 2025.BibTeX TR2025-043 PDF
- @article{Chakrabarty2025apr,
- author = {Chakrabarty, Ankush and Vanfretti, Luigi and Wang, Ye and Mineyuki, Takuma and Zhan, Sicheng and Tang, Wei-Ting and Paulson, Joel A. and Deshpande, Vedang M. and Bortoff, Scott A. and Laughman, Christopher R.},
- title = {{Time-Series Generative Networks for Synthesizing Realistic Scenarios in Occupant-Centric Building Simulation}},
- journal = {Building Simulation},
- year = 2025,
- month = apr,
- url = {https://www.merl.com/publications/TR2025-043}
- }
- , "Projection-free computation of robust controllable sets with constrained zonotopes", Automatica, DOI: 10.1016/j.automatica.2025.112211, Vol. 175, pp. 112211, March 2025.BibTeX TR2025-023 PDF Video
- @article{Vinod2025mar,
- author = {Vinod, Abraham P. and Weiss, Avishai and Di Cairano, Stefano},
- title = {{Projection-free computation of robust controllable sets with constrained zonotopes}},
- journal = {Automatica},
- year = 2025,
- volume = 175,
- pages = 112211,
- month = mar,
- doi = {10.1016/j.automatica.2025.112211},
- issn = {0005-1098},
- url = {https://www.merl.com/publications/TR2025-023}
- }
- , "Coactive Preference-Guided Multi-Objective Bayesian Optimization: An Application to Policy Learning in Personalized Plasma Medicine", IEEE Control Systems Letters, February 2025.BibTeX TR2025-021 PDF
- @article{Shao2025feb,
- author = {Shao, Ketong and Chakrabarty, Ankush and Mesbah, Ali and Romeres, Diego},
- title = {{Coactive Preference-Guided Multi-Objective Bayesian Optimization: An Application to Policy Learning in Personalized Plasma Medicine}},
- journal = {IEEE Control Systems Letters},
- year = 2025,
- month = feb,
- url = {https://www.merl.com/publications/TR2025-021}
- }
- , "User Preference Meets Pareto-Optimality in Multi-Objective Bayesian Optimization", AAAI Conference on Artificial Intelligence, February 2025.BibTeX TR2025-018 PDF
- @inproceedings{Ip2025feb,
- author = {{{Ip, Joshua Hang Sai and Chakrabarty, Ankush and Mesbah, Ali and Romeres, Diego}}},
- title = {{{User Preference Meets Pareto-Optimality in Multi-Objective Bayesian Optimization}}},
- booktitle = {AAAI Conference on Artificial Intelligence},
- year = 2025,
- month = feb,
- url = {https://www.merl.com/publications/TR2025-018}
- }
- , "Decentralized, Safe, Multi-agent Motion Planning for Drones Under Uncertainty via Filtered Reinforcement Learning", IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2024.3433229, Vol. 32, No. 6, pp. 2492-2499, January 2025.BibTeX TR2024-136 PDF
- @article{Vinod2025jan,
- author = {Vinod, Abraham P. and Safaoui, Sleiman and Summers, Tyler and Yoshikawa, Nobuyuki and {Di Cairano}, Stefano},
- title = {{Decentralized, Safe, Multi-agent Motion Planning for Drones Under Uncertainty via Filtered Reinforcement Learning}},
- journal = {IEEE Transactions on Control Systems Technology},
- year = 2025,
- volume = 32,
- number = 6,
- pages = {2492--2499},
- month = jan,
- doi = {10.1109/TCST.2024.3433229},
- url = {https://www.merl.com/publications/TR2024-136}
- }
- , "Continuous-Time Successive Convexification for Passively-Safe Six-Degree-of-Freedom Powered-Descent Guidance", AIAA SciTech, DOI: 10.2514/6.2025-1894, January 2025, pp. 1-13.BibTeX TR2025-008 PDF
- @inproceedings{Elango2025jan,
- author = {Elango, Purnanand and Vinod, Abraham P. and {Di Cairano}, Stefano and Weiss, Avishai},
- title = {{Continuous-Time Successive Convexification for Passively-Safe Six-Degree-of-Freedom Powered-Descent Guidance}},
- booktitle = {AIAA SCITECH 2025 Forum},
- year = 2025,
- pages = {1--13},
- month = jan,
- publisher = {AIAA},
- doi = {10.2514/6.2025-1894},
- url = {https://www.merl.com/publications/TR2025-008}
- }
- , "Integrated Optimal Control for Fast Charging and Active Thermal Management of Lithium-Ion Batteries in Extreme Ambient Temperatures", IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2024.3498812, Vol. 33, No. 2, pp. 714-728, December 2024.BibTeX TR2025-005 PDF
- @article{Lu2024dec,
- author = {Lu, Zehui and Tu, Hao and Fang, Huazhen and Wang, Yebin and Mou, Shaoshuai},
- title = {{Integrated Optimal Control for Fast Charging and Active Thermal Management of Lithium-Ion Batteries in Extreme Ambient Temperatures}},
- journal = {IEEE Transactions on Control Systems Technology},
- year = 2024,
- volume = 33,
- number = 2,
- pages = {714--728},
- month = dec,
- doi = {10.1109/TCST.2024.3498812},
- url = {https://www.merl.com/publications/TR2025-005}
- }
- , "Simultaneous Trajectory Optimization and Contact Selection for Contact-rich Manipulation with High-Fidelity Geometry", IEEE Transactions on Robotics (T-RO), April 2025.
-
Videos
-
Software & Data Downloads
-
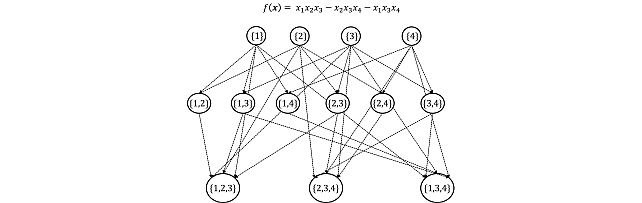
Optimal Recursive McCormick Linearization of MultiLinear Programs -
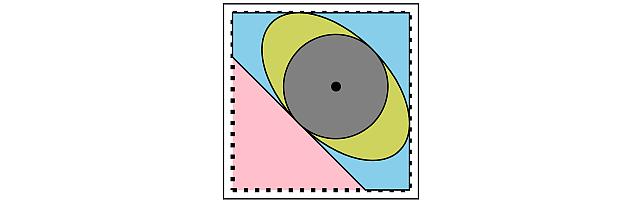
Convex sets in Python -
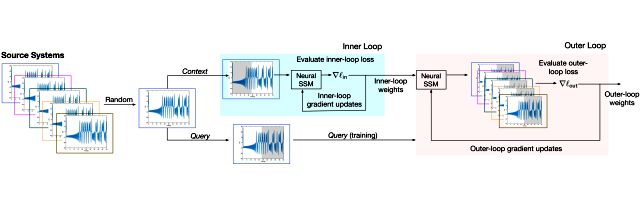
Meta-Learning State Space Models -

Python-based Robotic Control & Optimization Package -

Template Embeddings for Adiabatic Quantum Computation -

Quasi-Newton Trust Region Policy Optimization -

Convergent Inverse Scattering using Optimization and Regularization
-