Control
If it moves, we control it.
Our expertise in this area covers multivariable, nonlinear, optimal and model-predictive control theory, nonlinear estimation, nonlinear dynamical systems, and mechanical design. We conduct both fundamental and applied research targeting a wide range of applications including autonomous driving, factory automation and HVAC systems.
Quick Links
-
Researchers

Stefano
Di Cairano

Yebin
Wang

Avishai
Weiss

Scott A.
Bortoff

Ankush
Chakrabarty

Christopher R.
Laughman

Daniel N.
Nikovski

Abraham P.
Vinod

Diego
Romeres

Devesh K.
Jha

Arvind
Raghunathan

Philip V.
Orlik

William S.
Yerazunis

Abraham
Goldsmith

Vedang M.
Deshpande

Jianlin
Guo

Chungwei
Lin

Hongtao
Qiao

Purnanand
Elango

Toshiaki
Koike-Akino

Matthew
Brand

Yanting
Ma

Pedro
Miraldo

Petros T.
Boufounos

Dehong
Liu

Hassan
Mansour

Ye
Wang

Gordon
Wichern

Jinyun
Zhang

Siddarth
Jain

Kieran
Parsons

Alexander
Schperberg

Hongbo
Sun

Bingnan
Wang

Na
Li
-
Awards
-
AWARD Arvind Raghunathan receives Roberto Tempo Best CDC Paper Award at 2022 IEEE Conference on Decision & Control (CDC) Date: December 8, 2022
Awarded to: Arvind Raghunathan
MERL Contact: Arvind Raghunathan
Research Areas: Control, OptimizationBrief- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
The award is given annually in honor of Roberto Tempo, the 44th President of the IEEE Control Systems Society (CSS). The Tempo Award Committee selects the best paper from the previous year's CDC based on originality, potential impact on any aspect of control theory, technology, or implementation, and for the clarity of writing. This year's award committee was headed by Prof. Patrizio Colaneri, Politecnico di Milano. Arvind's paper was nominated for the award by Prof. Lorenz Biegler, Carnegie Mellon University, with supporting letters from Prof. Andreas Waechter, Northwestern University, and Prof. Victor Zavala, University of Wisconsin-Madison.
- Arvind Raghunathan, Senior Principal Research Scientist in the Data Analytics group, received the IEEE Control Systems Society Roberto Tempo Best CDC Paper Award. The award was presented at the 2022 IEEE Conference on Decision & Control (CDC).
-
AWARD MERL Researcher Devesh Jha Wins the Rudolf Kalman Best Paper Award 2019 Date: October 10, 2019
Awarded to: Devesh Jha, Nurali Virani, Zhenyuan Yuan, Ishana Shekhawat and Asok Ray
MERL Contact: Devesh K. Jha
Research Areas: Artificial Intelligence, Control, Data Analytics, Machine Learning, RoboticsBrief- MERL researcher Devesh Jha has won the Rudolf Kalman Best Paper Award 2019 for the paper entitled "Imitation of Demonstrations Using Bayesian Filtering With Nonparametric Data-Driven Models". This paper, published in a Special Commemorative Issue for Rudolf E. Kalman in the ASME JDSMC in March 2018, uses Bayesian filtering for imitation learning in Hidden Mode Hybrid Systems. This award is given annually by the Dynamic Systems and Control Division of ASME to the authors of the best paper published in the ASME Journal of Dynamic Systems Measurement and Control during the preceding year.
See All Awards for MERL -
-
News & Events
-
NEWS MERL researchers present 7 papers at CDC 2024 Date: December 16, 2024 - December 19, 2024
Where: Milan, Italy
MERL Contacts: Ankush Chakrabarty; Vedang M. Deshpande; Stefano Di Cairano; Abraham P. Vinod; Avishai Weiss; Gordon Wichern
Research Areas: Artificial Intelligence, Control, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, RoboticsBrief- MERL researchers presented 7 papers at the recently concluded Conference on Decision and Control (CDC) 2024 in Milan, Italy. The papers covered a wide range of topics including safety shielding for stochastic model predictive control, reinforcement learning using expert observations, physics-constrained meta learning for positioning, variational-Bayes Kalman filtering, Bayesian measurement masks for GNSS positioning, divert-feasible lunar landing, and centering and stochastic control using constrained zonotopes.
As a sponsor of the conference, MERL maintained a booth for open discussions with researchers and students, and hosted a special session to discuss highlights of MERL research and work philosophy.
In addition, Ankush Chakrabarty (Principal Research Scientist, Multiphysical Systems Team) was an invited speaker in the pre-conference Workshop on "Learning Dynamics From Data" where he gave a talk on few-shot meta-learning for black-box identification using data from similar systems.
- MERL researchers presented 7 papers at the recently concluded Conference on Decision and Control (CDC) 2024 in Milan, Italy. The papers covered a wide range of topics including safety shielding for stochastic model predictive control, reinforcement learning using expert observations, physics-constrained meta learning for positioning, variational-Bayes Kalman filtering, Bayesian measurement masks for GNSS positioning, divert-feasible lunar landing, and centering and stochastic control using constrained zonotopes.
-
NEWS MERL Researchers to Present 2 Conference and 11 Workshop Papers at NeurIPS 2024 Date: December 10, 2024 - December 15, 2024
Where: Advances in Neural Processing Systems (NeurIPS)
MERL Contacts: Petros T. Boufounos; Matthew Brand; Ankush Chakrabarty; Anoop Cherian; François Germain; Toshiaki Koike-Akino; Christopher R. Laughman; Jonathan Le Roux; Jing Liu; Suhas Lohit; Tim K. Marks; Yoshiki Masuyama; Kieran Parsons; Kuan-Chuan Peng; Diego Romeres; Pu (Perry) Wang; Ye Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Communications, Computational Sensing, Computer Vision, Control, Data Analytics, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, Robotics, Signal Processing, Speech & Audio, Human-Computer Interaction, Information SecurityBrief- MERL researchers will attend and present the following papers at the 2024 Advances in Neural Processing Systems (NeurIPS) Conference and Workshops.
1. "RETR: Multi-View Radar Detection Transformer for Indoor Perception" by Ryoma Yataka (Mitsubishi Electric), Adriano Cardace (Bologna University), Perry Wang (Mitsubishi Electric Research Laboratories), Petros Boufounos (Mitsubishi Electric Research Laboratories), Ryuhei Takahashi (Mitsubishi Electric). Main Conference. https://neurips.cc/virtual/2024/poster/95530
2. "Evaluating Large Vision-and-Language Models on Children's Mathematical Olympiads" by Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Joanna Matthiesen (Math Kangaroo USA), Kevin Smith (Massachusetts Institute of Technology), Josh Tenenbaum (Massachusetts Institute of Technology). Main Conference, Datasets and Benchmarks track. https://neurips.cc/virtual/2024/poster/97639
3. "Probabilistic Forecasting for Building Energy Systems: Are Time-Series Foundation Models The Answer?" by Young-Jin Park (Massachusetts Institute of Technology), Jing Liu (Mitsubishi Electric Research Laboratories), François G Germain (Mitsubishi Electric Research Laboratories), Ye Wang (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Gordon Wichern (Mitsubishi Electric Research Laboratories), Navid Azizan (Massachusetts Institute of Technology), Christopher R. Laughman (Mitsubishi Electric Research Laboratories), Ankush Chakrabarty (Mitsubishi Electric Research Laboratories). Time Series in the Age of Large Models Workshop.
4. "Forget to Flourish: Leveraging Model-Unlearning on Pretrained Language Models for Privacy Leakage" by Md Rafi Ur Rashid (Penn State University), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Shagufta Mehnaz (Penn State University), Ye Wang (Mitsubishi Electric Research Laboratories). Workshop on Red Teaming GenAI: What Can We Learn from Adversaries?
5. "Spatially-Aware Losses for Enhanced Neural Acoustic Fields" by Christopher Ick (New York University), Gordon Wichern (Mitsubishi Electric Research Laboratories), Yoshiki Masuyama (Mitsubishi Electric Research Laboratories), François G Germain (Mitsubishi Electric Research Laboratories), Jonathan Le Roux (Mitsubishi Electric Research Laboratories). Audio Imagination Workshop.
6. "FV-NeRV: Neural Compression for Free Viewpoint Videos" by Sorachi Kato (Osaka University), Takuya Fujihashi (Osaka University), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Takashi Watanabe (Osaka University). Machine Learning and Compression Workshop.
7. "GPT Sonography: Hand Gesture Decoding from Forearm Ultrasound Images via VLM" by Keshav Bimbraw (Worcester Polytechnic Institute), Ye Wang (Mitsubishi Electric Research Laboratories), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories). AIM-FM: Advancements In Medical Foundation Models: Explainability, Robustness, Security, and Beyond Workshop.
8. "Smoothed Embeddings for Robust Language Models" by Hase Ryo (Mitsubishi Electric), Md Rafi Ur Rashid (Penn State University), Ashley Lewis (Ohio State University), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Kieran Parsons (Mitsubishi Electric Research Laboratories), Ye Wang (Mitsubishi Electric Research Laboratories). Safe Generative AI Workshop.
9. "Slaying the HyDRA: Parameter-Efficient Hyper Networks with Low-Displacement Rank Adaptation" by Xiangyu Chen (University of Kansas), Ye Wang (Mitsubishi Electric Research Laboratories), Matthew Brand (Mitsubishi Electric Research Laboratories), Pu Wang (Mitsubishi Electric Research Laboratories), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories). Workshop on Adaptive Foundation Models.
10. "Preference-based Multi-Objective Bayesian Optimization with Gradients" by Joshua Hang Sai Ip (University of California Berkeley), Ankush Chakrabarty (Mitsubishi Electric Research Laboratories), Ali Mesbah (University of California Berkeley), Diego Romeres (Mitsubishi Electric Research Laboratories). Workshop on Bayesian Decision-Making and Uncertainty. Lightning talk spotlight.
11. "TR-BEACON: Shedding Light on Efficient Behavior Discovery in High-Dimensions with Trust-Region-based Bayesian Novelty Search" by Wei-Ting Tang (Ohio State University), Ankush Chakrabarty (Mitsubishi Electric Research Laboratories), Joel A. Paulson (Ohio State University). Workshop on Bayesian Decision-Making and Uncertainty.
12. "MEL-PETs Joint-Context Attack for the NeurIPS 2024 LLM Privacy Challenge Red Team Track" by Ye Wang (Mitsubishi Electric Research Laboratories), Tsunato Nakai (Mitsubishi Electric), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Kento Oonishi (Mitsubishi Electric), Takuya Higashi (Mitsubishi Electric). LLM Privacy Challenge. Special Award for Practical Attack.
13. "MEL-PETs Defense for the NeurIPS 2024 LLM Privacy Challenge Blue Team Track" by Jing Liu (Mitsubishi Electric Research Laboratories), Ye Wang (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Tsunato Nakai (Mitsubishi Electric), Kento Oonishi (Mitsubishi Electric), Takuya Higashi (Mitsubishi Electric). LLM Privacy Challenge. Won 3rd Place Award.
MERL members also contributed to the organization of the Multimodal Algorithmic Reasoning (MAR) Workshop (https://marworkshop.github.io/neurips24/). Organizers: Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Honglu Zhou (Salesforce Research), Kevin Smith (Massachusetts Institute of Technology), Tim K. Marks (Mitsubishi Electric Research Laboratories), Juan Carlos Niebles (Salesforce AI Research), Petar Veličković (Google DeepMind).
- MERL researchers will attend and present the following papers at the 2024 Advances in Neural Processing Systems (NeurIPS) Conference and Workshops.
See All News & Events for Control -
-
Internships
-
CV0063: Internship - Visual Simultaneous Localization and Mapping
MERL is looking for a self-motivated graduate student to work on Visual Simultaneous Localization and Mapping (V-SLAM). Based on the candidate’s interests, the intern can work on a variety of topics such as (but not limited to): camera pose estimation, feature detection and matching, visual-LiDAR data fusion, pose-graph optimization, loop closure detection, and image-based camera relocalization. The ideal candidate would be a PhD student with a strong background in 3D computer vision and good programming skills in C/C++ and/or Python. The candidate must have published at least one paper in a top-tier computer vision, machine learning, or robotics venue, such as CVPR, ECCV, ICCV, NeurIPS, ICRA, or IROS. The intern will collaborate with MERL researchers to derive and implement new algorithms for V-SLAM, conduct experiments, and report findings. A submission to a top-tier conference is expected. The duration of the internship and start date are flexible.
Required Specific Experience
- Experience with 3D Computer Vision and Simultaneous Localization & Mapping.
-
CA0129: Internship - LLM-guided Active SLAM for Mobile Robots
MERL is seeking interns passionate about robotics to contribute to the development of an Active Simultaneous Localization and Mapping (Active SLAM) framework guided by Large Language Models (LLM). The core objective is to achieve autonomous behavior for mobile robots. The methods will be implemented and evaluated in high performance simulators and (time-permitting) in actual robotic platforms, such as legged and wheeled robots. The expectation at the end of the internship is a publication at a top-tier robotic or computer vision conference and/or journal.
The internship has a flexible start date (Spring/Summer 2025), with a duration of 3-6 months depending on agreed scope and intermediate progress.
Required Specific Experience
- Current/Past Enrollment in a PhD Program in Computer Engineering, Computer Science, Electrical Engineering, Mechanical Engineering, or related field
- Experience with employing and fine-tuning LLM and/or Visual Language Models (VLM) for high-level context-aware planning and navigation
- 2+ years experience with 3D computer vision (e.g., point cloud, voxels, camera pose estimation) and mapping, filter-based methods (e.g., EKF), and in at least some of: motion planning algorithms, factor graphs, control, and optimization
- Excellent programming skills in Python and/or C/C++, with prior knowledge in ROS2 and high-fidelity simulators such as Gazebo, Isaac Lab, and/or Mujoco
Additional Desired Experience
- Prior experience with implementation and/or development of SLAM algorithms on robotic hardware, including acquisition, processing, and fusion of multimodal sensor data such as proprioceptive and exteroceptive sensors
-
MS0102: Internship - Estimation and Calibration of Multi-physical Systems Using Experiments
MERL is looking for a highly motivated and qualified candidate to work on estimation and calibration of muti-physical systems governed by differential algebraic equations (DAEs). The research will involve study, development and efficient implementation of estimation/calibration approaches for large-scale nonlinear systems, e.g., vapor compression cycles, with limited experimental data. The ideal candidate will have a strong background in one or multiple of the following topics: nonlinear control and estimation, optimization, and model calibration; with expertise demonstrated via, e.g., peer-reviewed publications. Prior experience in working with experimental data, and programming in Julia/Modelica is a plus. Senior PhD students in mechanical, electrical, chemical engineering or related fields are encouraged to apply. The typical duration of internship is 3 months, and the start date is flexible.
Required Specific Experience
- Graduate student with 2+ years of relevant research experience
Additional Desired Experience
- Strong programming skills in Julia or Modelica
- Prior experience in working with thermofluid systems
- Prior experience in estimation/calibration of complex nonlinear systems using experimental data
See All Internships for Control -
-
Openings
-
CA0093: Research Scientist - Control for Autonomous Systems
-
EA0042: Research Scientist - Control & Learning
See All Openings at MERL -
-
Recent Publications
- , "Time-optimal single-scalar control on a qubit of unitary dynamics", Physical Review, April 2025.BibTeX TR2025-048 PDF
- @article{Lin2025apr2,
- author = {Lin, Chungwei and Boufounos, Petros T. and Ma, Yanting and Wang, Yebin and Ding, Qi and Sels, Dries and Chien, Chih-Chun},
- title = {{Time-optimal single-scalar control on a qubit of unitary dynamics}},
- journal = {Physical Review},
- year = 2025,
- month = apr,
- url = {https://www.merl.com/publications/TR2025-048}
- }
- , "Learning Visual Servoing for Nonholonomic Mobile Robots with Uncalibrated Cameras", The 40th ACM/SIGAPP Symposium On Applied Computing, March 2025.BibTeX TR2025-042 PDF
- @inproceedings{Wang2025mar2,
- author = {Wang, Jen-Wei and Nikovski, Daniel N.},
- title = {{Learning Visual Servoing for Nonholonomic Mobile Robots with Uncalibrated Cameras}},
- booktitle = {The 40th ACM/SIGAPP Symposium On Applied Computing},
- year = 2025,
- month = mar,
- url = {https://www.merl.com/publications/TR2025-042}
- }
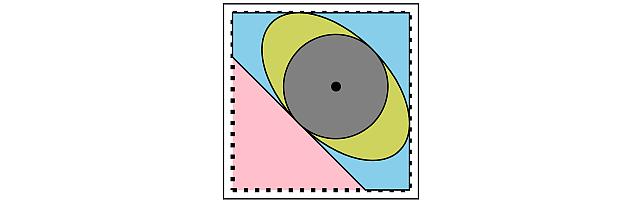
- , "Projection-free computation of robust controllable sets with constrained zonotopes", Automatica, DOI: 10.1016/j.automatica.2025.112211, Vol. 175, pp. 112211, March 2025.BibTeX TR2025-023 PDF Video
- @article{Vinod2025mar,
- author = {Vinod, Abraham P. and Weiss, Avishai and Di Cairano, Stefano},
- title = {{Projection-free computation of robust controllable sets with constrained zonotopes}},
- journal = {Automatica},
- year = 2025,
- volume = 175,
- pages = 112211,
- month = mar,
- doi = {10.1016/j.automatica.2025.112211},
- issn = {0005-1098},
- url = {https://www.merl.com/publications/TR2025-023}
- }
- , "PIETRA: Physics-Informed Evidential Learning for Traversing Out-of-Distribution Terrain", IEEE Robotics and Automation Letters (RA-L), DOI: 10.1109/LRA.2025.3527285, Vol. 10, No. 3, pp. 2359-2366, February 2025.BibTeX TR2025-022 PDF
- @article{Cai2025feb,
- author = {Cai, Xiaoyi and Queeney, James and Xu, Tong and Datar, Aniket and Pan, Chenhui and Miller, Max and Flather, Ashton and Osteen, Philip R. and Roy, Nicholas and Xiao, Xuesu and How, Jonathan P.},
- title = {{PIETRA: Physics-Informed Evidential Learning for Traversing Out-of-Distribution Terrain}},
- journal = {IEEE Robotics and Automation Letters (RA-L)},
- year = 2025,
- volume = 10,
- number = 3,
- pages = {2359--2366},
- month = feb,
- doi = {10.1109/LRA.2025.3527285},
- url = {https://www.merl.com/publications/TR2025-022}
- }
- , "Generalized Policy Improvement Algorithms with Theoretically Supported Sample Reuse", IEEE Transactions on Automatic Control, DOI: 10.1109/TAC.2024.3454011, Vol. 70, No. 2, pp. 1236-1243, February 2025.BibTeX TR2025-015 PDF
- @article{Queeney2025feb,
- author = {Queeney, James and Paschalidis, Ioannis Ch. and Cassandras, Christos G.},
- title = {{Generalized Policy Improvement Algorithms with Theoretically Supported Sample Reuse}},
- journal = {IEEE Transactions on Automatic Control},
- year = 2025,
- volume = 70,
- number = 2,
- pages = {1236--1243},
- month = feb,
- doi = {10.1109/TAC.2024.3454011},
- url = {https://www.merl.com/publications/TR2025-015}
- }
- , "Decentralized, Safe, Multi-agent Motion Planning for Drones Under Uncertainty via Filtered Reinforcement Learning", IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2024.3433229, Vol. 32, No. 6, pp. 2492-2499, January 2025.BibTeX TR2024-136 PDF
- @article{Vinod2025jan,
- author = {Vinod, Abraham P. and Safaoui, Sleiman and Summers, Tyler and Yoshikawa, Nobuyuki and {Di Cairano}, Stefano},
- title = {{Decentralized, Safe, Multi-agent Motion Planning for Drones Under Uncertainty via Filtered Reinforcement Learning}},
- journal = {IEEE Transactions on Control Systems Technology},
- year = 2025,
- volume = 32,
- number = 6,
- pages = {2492--2499},
- month = jan,
- doi = {10.1109/TCST.2024.3433229},
- url = {https://www.merl.com/publications/TR2024-136}
- }
- , "Invariant Set Planning for Quadrotors: Design, Analysis, Experiments", IEEE Transactions on Control Systems Technology, DOI: 10.1109/TCST.2024.3492813, Vol. 33, No. 2, pp. 449-462, January 2025.BibTeX TR2025-010 PDF
- @article{Greiff2025jan,
- author = {Greiff, Marcus and Sinhmar, Himani and Weiss, Avishai and Berntorp, Karl and {Di Cairano}, Stefano},
- title = {{Invariant Set Planning for Quadrotors: Design, Analysis, Experiments}},
- journal = {IEEE Transactions on Control Systems Technology},
- year = 2025,
- volume = 33,
- number = 2,
- pages = {449--462},
- month = jan,
- doi = {10.1109/TCST.2024.3492813},
- issn = {1063-6536},
- url = {https://www.merl.com/publications/TR2025-010}
- }
- , "Continuous-Time Successive Convexification for Passively-Safe Six-Degree-of-Freedom Powered-Descent Guidance", AIAA SciTech, DOI: 10.2514/6.2025-1894, January 2025, pp. 1-13.BibTeX TR2025-008 PDF
- @inproceedings{Elango2025jan,
- author = {Elango, Purnanand and Vinod, Abraham P. and {Di Cairano}, Stefano and Weiss, Avishai},
- title = {{Continuous-Time Successive Convexification for Passively-Safe Six-Degree-of-Freedom Powered-Descent Guidance}},
- booktitle = {AIAA SCITECH 2025 Forum},
- year = 2025,
- pages = {1--13},
- month = jan,
- publisher = {AIAA},
- doi = {10.2514/6.2025-1894},
- url = {https://www.merl.com/publications/TR2025-008}
- }
- , "Time-optimal single-scalar control on a qubit of unitary dynamics", Physical Review, April 2025.
-
Videos
-
Software & Data Downloads