Computational Sensing
Utilizing computation to improve sensing capabilities.
Our research in the area of computational sensing focuses on signal acquisition and design, signal modeling and reconstruction algorithms, including inverse problems, as well as array signal processing techniques.
Quick Links
-
Researchers
-
Awards
-
AWARD MERL’s Paper on Wi-Fi Sensing Earns Top 3% Paper Recognition at ICASSP 2023, Selected as a Best Student Paper Award Finalist Date: June 9, 2023
Awarded to: Cristian J. Vaca-Rubio, Pu Wang, Toshiaki Koike-Akino, Ye Wang, Petros Boufounos and Petar Popovski
MERL Contacts: Petros T. Boufounos; Toshiaki Koike-Akino; Pu (Perry) Wang; Ye Wang
Research Areas: Artificial Intelligence, Communications, Computational Sensing, Dynamical Systems, Machine Learning, Signal ProcessingBrief- A MERL Paper on Wi-Fi sensing was recognized as a Top 3% Paper among all 2709 accepted papers at the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2023). Co-authored by Cristian Vaca-Rubio and Petar Popovski from Aalborg University, Denmark, and MERL researchers Pu Wang, Toshiaki Koike-Akino, Ye Wang, and Petros Boufounos, the paper "MmWave Wi-Fi Trajectory Estimation with Continous-Time Neural Dynamic Learning" was also a Best Student Paper Award finalist.
Performed during Cristian’s stay at MERL first as a visiting Marie Skłodowska-Curie Fellow and then as a full-time intern in 2022, this work capitalizes on standards-compliant Wi-Fi signals to perform indoor localization and sensing. The paper uses a neural dynamic learning framework to address technical issues such as low sampling rate and irregular sampling intervals.
ICASSP, a flagship conference of the IEEE Signal Processing Society (SPS), was hosted on the Greek island of Rhodes from June 04 to June 10, 2023. ICASSP 2023 marked the largest ICASSP in history, boasting over 4000 participants and 6128 submitted papers, out of which 2709 were accepted.
- A MERL Paper on Wi-Fi sensing was recognized as a Top 3% Paper among all 2709 accepted papers at the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2023). Co-authored by Cristian Vaca-Rubio and Petar Popovski from Aalborg University, Denmark, and MERL researchers Pu Wang, Toshiaki Koike-Akino, Ye Wang, and Petros Boufounos, the paper "MmWave Wi-Fi Trajectory Estimation with Continous-Time Neural Dynamic Learning" was also a Best Student Paper Award finalist.
-
AWARD Joshua Rapp wins Best Dissertation Award from the IEEE Signal Processing Society Date: December 20, 2021
Awarded to: Joshua Rapp
MERL Contact: Joshua Rapp
Research Areas: Computational Sensing, Signal ProcessingBrief- Joshua Rapp has won the 2021 Best PhD Dissertation Award from the IEEE Signal Processing Society.
The award recognizes a PhD thesis completed on a signal processing subject within the past three years for its relevant work in signal processing while stimulating further research in the field.
Dr. Rapp completed his PhD at Boston University in 2020 with a thesis entitled "Probabilistic Modeling for Single-Photon Lidar." The dissertation tackles challenges of the acquisition and processing of 3D depth maps reconstructed from time-of-flight data captured one photon at a time.
The award will be presented at the 2022 IEEE International Conference on Image Processing (ICIP) in France.
- Joshua Rapp has won the 2021 Best PhD Dissertation Award from the IEEE Signal Processing Society.
-
AWARD Petros Boufounos Elevated to IEEE Fellow Date: January 1, 2022
Awarded to: Petros T. Boufounos
MERL Contact: Petros T. Boufounos
Research Areas: Computational Sensing, Signal ProcessingBrief- MERL’s Petros Boufounos has been elevated to IEEE Fellow, effective January 2022, for “contributions to compressed sensing.”
IEEE Fellow is the highest grade of membership of the IEEE. It honors members with an outstanding record of technical achievements, contributing importantly to the advancement or application of engineering, science and technology, and bringing significant value to society. Each year, following a rigorous evaluation procedure, the IEEE Fellow Committee recommends a select group of recipients for elevation to IEEE Fellow. Less than 0.1% of voting members are selected annually for this member grade elevation.
- MERL’s Petros Boufounos has been elevated to IEEE Fellow, effective January 2022, for “contributions to compressed sensing.”
See All Awards for Computational Sensing -
-
News & Events
-
EVENT MERL Contributes to ICASSP 2025 Date: Sunday, April 6, 2025 - Friday, April 11, 2025
Location: Hyderabad, India
MERL Contacts: Wael H. Ali; Petros T. Boufounos; Radu Corcodel; François Germain; Chiori Hori; Siddarth Jain; Devesh K. Jha; Toshiaki Koike-Akino; Jonathan Le Roux; Yanting Ma; Hassan Mansour; Yoshiki Masuyama; Joshua Rapp; Diego Romeres; Anthony Vetro; Pu (Perry) Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Communications, Computational Sensing, Electronic and Photonic Devices, Machine Learning, Robotics, Signal Processing, Speech & AudioBrief- MERL has made numerous contributions to both the organization and technical program of ICASSP 2025, which is being held in Hyderabad, India from April 6-11, 2025.
Sponsorship
MERL is proud to be a Silver Patron of the conference and will participate in the student job fair on Thursday, April 10. Please join this session to learn more about employment opportunities at MERL, including openings for research scientists, post-docs, and interns.
MERL is pleased to be the sponsor of two IEEE Awards that will be presented at the conference. We congratulate Prof. Björn Erik Ottersten, the recipient of the 2025 IEEE Fourier Award for Signal Processing, and Prof. Shrikanth Narayanan, the recipient of the 2025 IEEE James L. Flanagan Speech and Audio Processing Award. Both awards will be presented in-person at ICASSP by Anthony Vetro, MERL President & CEO.
Technical Program
MERL is presenting 15 papers in the main conference on a wide range of topics including source separation, sound event detection, sound anomaly detection, speaker diarization, music generation, robot action generation from video, indoor airflow imaging, WiFi sensing, Doppler single-photon Lidar, optical coherence tomography, and radar imaging. Another paper on spatial audio will be presented at the Generative Data Augmentation for Real-World Signal Processing Applications (GenDA) Satellite Workshop.
MERL Researchers Petros Boufounos and Hassan Mansour will present a Tutorial on “Computational Methods in Radar Imaging” in the afternoon of Monday, April 7.
Petros Boufounos will also be giving an industry talk on Thursday April 10 at 12pm, on “A Physics-Informed Approach to Sensing".
About ICASSP
ICASSP is the flagship conference of the IEEE Signal Processing Society, and the world's largest and most comprehensive technical conference focused on the research advances and latest technological development in signal and information processing. The event has been attracting more than 4000 participants each year.
- MERL has made numerous contributions to both the organization and technical program of ICASSP 2025, which is being held in Hyderabad, India from April 6-11, 2025.
-
TALK [MERL Seminar Series 2025] Qing Qu presents talk titled The Emergence of Generalizability and Semantic Low-Dim Subspaces in Diffusion Models Date & Time: Wednesday, March 5, 2025; 12:00 PM
Speaker: Qing Qu, University of Michigan
MERL Host: Pu (Perry) Wang
Research Areas: Artificial Intelligence, Computational Sensing, Machine Learning, Signal ProcessingAbstract Recent empirical studies have shown that diffusion models possess a unique reproducibility property, transiting from memorization to generalization as the number of training samples increases. This demonstrates that diffusion models can effectively learn image distributions and generate new samples. Remarkably, these models achieve this even with a small number of training samples, despite the challenge of large image dimensions, effectively circumventing the curse of dimensionality. In this work, we provide theoretical insights into this phenomenon by leveraging two key empirical observations: (i) the low intrinsic dimensionality of image datasets and (ii) the low-rank property of the denoising autoencoder in trained diffusion models. With these setups, we rigorously demonstrate that optimizing the training loss of diffusion models is equivalent to solving the canonical subspace clustering problem across the training samples. This insight has practical implications for training and controlling diffusion models. Specifically, it enables us to precisely characterize the minimal number of samples necessary for accurately learning the low-rank data support, shedding light on the phase transition from memorization to generalization. Additionally, we empirically establish a correspondence between the subspaces and the semantic representations of image data, which enables one-step, transferrable, efficient image editing. Moreover, our results have profound practical implications for training efficiency and model safety, and they also open up numerous intriguing theoretical questions for future research.
Recent empirical studies have shown that diffusion models possess a unique reproducibility property, transiting from memorization to generalization as the number of training samples increases. This demonstrates that diffusion models can effectively learn image distributions and generate new samples. Remarkably, these models achieve this even with a small number of training samples, despite the challenge of large image dimensions, effectively circumventing the curse of dimensionality. In this work, we provide theoretical insights into this phenomenon by leveraging two key empirical observations: (i) the low intrinsic dimensionality of image datasets and (ii) the low-rank property of the denoising autoencoder in trained diffusion models. With these setups, we rigorously demonstrate that optimizing the training loss of diffusion models is equivalent to solving the canonical subspace clustering problem across the training samples. This insight has practical implications for training and controlling diffusion models. Specifically, it enables us to precisely characterize the minimal number of samples necessary for accurately learning the low-rank data support, shedding light on the phase transition from memorization to generalization. Additionally, we empirically establish a correspondence between the subspaces and the semantic representations of image data, which enables one-step, transferrable, efficient image editing. Moreover, our results have profound practical implications for training efficiency and model safety, and they also open up numerous intriguing theoretical questions for future research.
See All News & Events for Computational Sensing -
-
Research Highlights
-
Internships
-
ST0081: Internship - Optical Sensing for Airflow Reconstruction
The Computational Sensing team at MERL is seeking motivated and qualified individuals to develop algorithms that can perform background oriented schlieren (BOS) tomography. The project goal is to utilize both analytical and learning-based architectures to enable the reconstruction of 3D air flows in an indoor setting from BOS measurements coupled with physics informed machine learning. Ideal candidates should be Ph.D. students and have solid background and publication record in any of the following, or related areas: imaging inverse problems, large-scale optimization, differentiable scene rendering, learning-based modeling for imaging, and physics informed neural networks. Preferred skills include experience with schlieren tomography, inverse rendering, neural scene representation, and computational imaging hardware. Publication of the results produced during our internships is expected. The duration of the internships is anticipated to be 3-6 months. Start date is flexible.
Required Specific Experience
- Experience with differentiable/physics-based rendering.
-
ST0096: Internship - Multimodal Tracking and Imaging
MERL is seeking a motivated intern to assist in developing hardware and algorithms for multimodal imaging applications. The project involves integration of radar, camera, and depth sensors in a variety of sensing scenarios. The ideal candidate should have experience with FMCW radar and/or depth sensing, and be fluent in Python and scripting methods. Familiarity with optical tracking of humans and experience with hardware prototyping is desired. Good knowledge of computational imaging and/or radar imaging methods is a plus.
Required Specific Experience
- Experience with Python and Python Deep Learning Frameworks.
- Experience with FMCW radar and/or Depth Sensors.
-
ST0116: Internship - Deep Learning for Radar Perception
The Computation Sensing team at MERL is seeking a highly motivated intern to conduct fundamental research in radar perception. Expertise in deep learning-based object detection, pose estimation, segmentation, multiple object tracking (MOT), and representation learning on radar data is required. Previous hands-on experience with open indoor and outdoor radar datasets is a plus. Familiarity with basic radar concepts and MERL's recent work in radar perception is an asset. The intern will work closely with MERL researchers to develop novel algorithms, design experiments with MERL in-house testbed, and prepare results for patents and publication. The internship is expected to last 3 months with a preferred start date after June 2025.
Required Specific Experience
- Solid understanding of state-of-the-art perception frameworks including transformer-based (e.g., DETR) and diffusion-based (e.g., DiffusionDet) methods.
- Hands-on experience with open large-scale radar datasets such as MMVR, HIBER, RADIATE, and K-Radar.
- Proficiency in Python and experience with job scheduling on GPU clusters using tools like Slurm.
- Proven publication records in top-tier venues such as CVPR, ICCV, ECCV, NeurIPS.
- Knowledge of basic radar concepts such as FMCW, MIMO, (micro-) Doppler signature, radar point clouds, heatmaps, and raw ADC waveforms.
- Familiarity with MERL's recent radar perception research such as TempoRadar, SIRA, MMVR, and RETR.
See All Internships for Computational Sensing -
-
Recent Publications
- , "Simultaneous Range and Velocity Measurement with Doppler Single-Photon Lidar", Optica, April 2025.BibTeX TR2025-050 PDF
- @article{Kitichotkul2025apr,
- author = {Kitichotkul, Ruangrawee and Rapp, Joshua and Ma, Yanting and Mansour, Hassan},
- title = {{Simultaneous Range and Velocity Measurement with Doppler Single-Photon Lidar}},
- journal = {Optica},
- year = 2025,
- month = apr,
- url = {https://www.merl.com/publications/TR2025-050}
- }
- , "Enabling DMG Wi-Fi Sensing in Data Transmission Intervals by Exploiting Beam Training Codebook", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), April 2025.BibTeX TR2025-026 PDF
- @inproceedings{Attiah2025mar,
- author = {Attiah, Kareem and Wang, Pu and Mansour, Hassan and Koike-Akino, Toshiaki and Boufounos, Petros T.},
- title = {{Enabling DMG Wi-Fi Sensing in Data Transmission Intervals by Exploiting Beam Training Codebook}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2025,
- month = mar,
- url = {https://www.merl.com/publications/TR2025-026}
- }
- , "Doppler Single-Photon Lidar", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), April 2025.BibTeX TR2025-028 PDF
- @inproceedings{Kitichotkul2025mar,
- author = {Kitichotkul, Ruangrawee and Rapp, Joshua and Ma, Yanting and Mansour, Hassan},
- title = {{Doppler Single-Photon Lidar}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2025,
- month = mar,
- url = {https://www.merl.com/publications/TR2025-028}
- }
- , "Indoor Airflow Imaging Using Physics-Informed Schlieren Tomography", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), April 2025.BibTeX TR2025-035 PDF
- @inproceedings{Teh2025mar,
- author = {Teh, Arjun and Ali, Wael H. and Rapp, Joshua and Mansour, Hassan},
- title = {{Indoor Airflow Imaging Using Physics-Informed Schlieren Tomography}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2025,
- month = mar,
- url = {https://www.merl.com/publications/TR2025-035}
- }
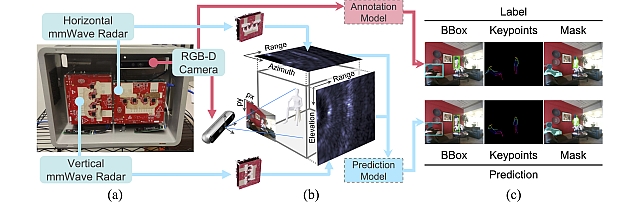
- , "Multi-View Radar Detection Transformer with Differentiable Positional Encoding", IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP), April 2025.BibTeX TR2025-027 PDF
- @inproceedings{Yataka2025mar,
- author = {Yataka, Ryoma and Wang, Pu and Boufounos, Petros T. and Takahashi, Ryuhei},
- title = {{Multi-View Radar Detection Transformer with Differentiable Positional Encoding}},
- booktitle = {IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP)},
- year = 2025,
- month = mar,
- url = {https://www.merl.com/publications/TR2025-027}
- }
- , "Multi-layered Surface Estimation for Low-cost Optical Coherence Tomography", IEEE Transactions on Computational Imaging, DOI: 10.1109/TCI.2024.3497602, Vol. 10, pp. 1706-1721, December 2024.BibTeX TR2024-164 PDF
- @article{Rapp2024dec,
- author = {Rapp, Joshua and Mansour, Hassan and Boufounos, Petros T. and Koike-Akino, Toshiaki and Parsons, Kieran},
- title = {{Multi-layered Surface Estimation for Low-cost Optical Coherence Tomography}},
- journal = {IEEE Transactions on Computational Imaging},
- year = 2024,
- volume = 10,
- pages = {1706--1721},
- month = dec,
- doi = {10.1109/TCI.2024.3497602},
- url = {https://www.merl.com/publications/TR2024-164}
- }
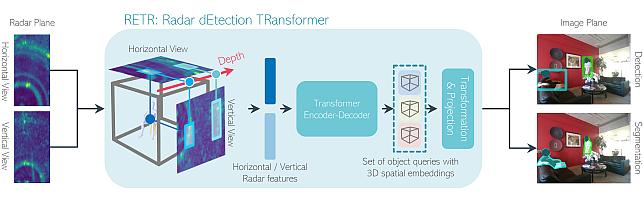
- , "RETR: Multi-View Radar Detection Transformer for Indoor Perception", Advances in Neural Information Processing Systems (NeurIPS), A. Globerson and L. Mackey and D. Belgrave and A. Fan and U. Paquet and J. Tomczak and C. Zhang, Eds., November 2024, pp. 19839-19869.BibTeX TR2024-159 PDF Software
- @inproceedings{Yataka2024nov3,
- author = {Yataka, Ryoma and Cardace, Adriano and Wang, Pu and Boufounos, Petros T. and Takahashi, Ryuhei},
- title = {{RETR: Multi-View Radar Detection Transformer for Indoor Perception}},
- booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
- year = 2024,
- editor = {A. Globerson and L. Mackey and D. Belgrave and A. Fan and U. Paquet and J. Tomczak and C. Zhang},
- pages = {19839--19869},
- month = nov,
- publisher = {Curran Associates, Inc.},
- url = {https://www.merl.com/publications/TR2024-159}
- }
- , "Single-pixel imaging of spatio-temporal flows using differentiable latent dynamics", IEEE Transactions on Computational Imaging, DOI: 10.1109/TCI.2024.3434541, Vol. 10, pp. 1124-1138, October 2024.BibTeX TR2024-151 PDF
- @article{Sholokhov2024oct,
- author = {Sholokhov, Aleksei and Nabi, Saleh and Rapp, Joshua and Brunton, Steven and Kutz, Nathan and Boufounos, Petros T. and Mansour, Hassan},
- title = {{Single-pixel imaging of spatio-temporal flows using differentiable latent dynamics}},
- journal = {IEEE Transactions on Computational Imaging},
- year = 2024,
- volume = 10,
- pages = {1124--1138},
- month = oct,
- doi = {10.1109/TCI.2024.3434541},
- url = {https://www.merl.com/publications/TR2024-151}
- }
- , "Simultaneous Range and Velocity Measurement with Doppler Single-Photon Lidar", Optica, April 2025.
-
Videos
-
Software & Data Downloads