Tim K. Marks

- Phone: 617-621-7524
- Email:
-
Position:
Research / Technical Staff
Senior Principal Research Scientist,
Senior Team Leader -
Education:
Ph.D., University of California, San Diego, 2006 -
Research Areas:
- Computer Vision
- Artificial Intelligence
- Machine Learning
- Speech & Audio
- Robotics
- Human-Computer Interaction
- Signal Processing
External Links:
Tim's Quick Links
-
Biography
Prior to joining MERL's Imaging Group in 2008, Tim did postdoctoral research in robotic Simultaneous Localization and Mapping in collaboration with NASA's Jet Propulsion Laboratory. His research at MERL spans a variety of areas in computer vision and machine learning, including face recognition under variations in pose and lighting, and robotic vision and touch-based registration for industrial automation.
-
Recent News & Events
-
NEWS MERL Researchers to Present 2 Conference and 11 Workshop Papers at NeurIPS 2024 Date: December 10, 2024 - December 15, 2024
Where: Advances in Neural Processing Systems (NeurIPS)
MERL Contacts: Petros T. Boufounos; Matthew Brand; Ankush Chakrabarty; Anoop Cherian; François Germain; Toshiaki Koike-Akino; Christopher R. Laughman; Jonathan Le Roux; Jing Liu; Suhas Lohit; Tim K. Marks; Yoshiki Masuyama; Kieran Parsons; Kuan-Chuan Peng; Diego Romeres; Pu (Perry) Wang; Ye Wang; Gordon Wichern
Research Areas: Artificial Intelligence, Communications, Computational Sensing, Computer Vision, Control, Data Analytics, Dynamical Systems, Machine Learning, Multi-Physical Modeling, Optimization, Robotics, Signal Processing, Speech & Audio, Human-Computer Interaction, Information SecurityBrief- MERL researchers will attend and present the following papers at the 2024 Advances in Neural Processing Systems (NeurIPS) Conference and Workshops.
1. "RETR: Multi-View Radar Detection Transformer for Indoor Perception" by Ryoma Yataka (Mitsubishi Electric), Adriano Cardace (Bologna University), Perry Wang (Mitsubishi Electric Research Laboratories), Petros Boufounos (Mitsubishi Electric Research Laboratories), Ryuhei Takahashi (Mitsubishi Electric). Main Conference. https://neurips.cc/virtual/2024/poster/95530
2. "Evaluating Large Vision-and-Language Models on Children's Mathematical Olympiads" by Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Joanna Matthiesen (Math Kangaroo USA), Kevin Smith (Massachusetts Institute of Technology), Josh Tenenbaum (Massachusetts Institute of Technology). Main Conference, Datasets and Benchmarks track. https://neurips.cc/virtual/2024/poster/97639
3. "Probabilistic Forecasting for Building Energy Systems: Are Time-Series Foundation Models The Answer?" by Young-Jin Park (Massachusetts Institute of Technology), Jing Liu (Mitsubishi Electric Research Laboratories), François G Germain (Mitsubishi Electric Research Laboratories), Ye Wang (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Gordon Wichern (Mitsubishi Electric Research Laboratories), Navid Azizan (Massachusetts Institute of Technology), Christopher R. Laughman (Mitsubishi Electric Research Laboratories), Ankush Chakrabarty (Mitsubishi Electric Research Laboratories). Time Series in the Age of Large Models Workshop.
4. "Forget to Flourish: Leveraging Model-Unlearning on Pretrained Language Models for Privacy Leakage" by Md Rafi Ur Rashid (Penn State University), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Shagufta Mehnaz (Penn State University), Ye Wang (Mitsubishi Electric Research Laboratories). Workshop on Red Teaming GenAI: What Can We Learn from Adversaries?
5. "Spatially-Aware Losses for Enhanced Neural Acoustic Fields" by Christopher Ick (New York University), Gordon Wichern (Mitsubishi Electric Research Laboratories), Yoshiki Masuyama (Mitsubishi Electric Research Laboratories), François G Germain (Mitsubishi Electric Research Laboratories), Jonathan Le Roux (Mitsubishi Electric Research Laboratories). Audio Imagination Workshop.
6. "FV-NeRV: Neural Compression for Free Viewpoint Videos" by Sorachi Kato (Osaka University), Takuya Fujihashi (Osaka University), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Takashi Watanabe (Osaka University). Machine Learning and Compression Workshop.
7. "GPT Sonography: Hand Gesture Decoding from Forearm Ultrasound Images via VLM" by Keshav Bimbraw (Worcester Polytechnic Institute), Ye Wang (Mitsubishi Electric Research Laboratories), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories). AIM-FM: Advancements In Medical Foundation Models: Explainability, Robustness, Security, and Beyond Workshop.
8. "Smoothed Embeddings for Robust Language Models" by Hase Ryo (Mitsubishi Electric), Md Rafi Ur Rashid (Penn State University), Ashley Lewis (Ohio State University), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Kieran Parsons (Mitsubishi Electric Research Laboratories), Ye Wang (Mitsubishi Electric Research Laboratories). Safe Generative AI Workshop.
9. "Slaying the HyDRA: Parameter-Efficient Hyper Networks with Low-Displacement Rank Adaptation" by Xiangyu Chen (University of Kansas), Ye Wang (Mitsubishi Electric Research Laboratories), Matthew Brand (Mitsubishi Electric Research Laboratories), Pu Wang (Mitsubishi Electric Research Laboratories), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories). Workshop on Adaptive Foundation Models.
10. "Preference-based Multi-Objective Bayesian Optimization with Gradients" by Joshua Hang Sai Ip (University of California Berkeley), Ankush Chakrabarty (Mitsubishi Electric Research Laboratories), Ali Mesbah (University of California Berkeley), Diego Romeres (Mitsubishi Electric Research Laboratories). Workshop on Bayesian Decision-Making and Uncertainty. Lightning talk spotlight.
11. "TR-BEACON: Shedding Light on Efficient Behavior Discovery in High-Dimensions with Trust-Region-based Bayesian Novelty Search" by Wei-Ting Tang (Ohio State University), Ankush Chakrabarty (Mitsubishi Electric Research Laboratories), Joel A. Paulson (Ohio State University). Workshop on Bayesian Decision-Making and Uncertainty.
12. "MEL-PETs Joint-Context Attack for the NeurIPS 2024 LLM Privacy Challenge Red Team Track" by Ye Wang (Mitsubishi Electric Research Laboratories), Tsunato Nakai (Mitsubishi Electric), Jing Liu (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Kento Oonishi (Mitsubishi Electric), Takuya Higashi (Mitsubishi Electric). LLM Privacy Challenge. Special Award for Practical Attack.
13. "MEL-PETs Defense for the NeurIPS 2024 LLM Privacy Challenge Blue Team Track" by Jing Liu (Mitsubishi Electric Research Laboratories), Ye Wang (Mitsubishi Electric Research Laboratories), Toshiaki Koike-Akino (Mitsubishi Electric Research Laboratories), Tsunato Nakai (Mitsubishi Electric), Kento Oonishi (Mitsubishi Electric), Takuya Higashi (Mitsubishi Electric). LLM Privacy Challenge. Won 3rd Place Award.
MERL members also contributed to the organization of the Multimodal Algorithmic Reasoning (MAR) Workshop (https://marworkshop.github.io/neurips24/). Organizers: Anoop Cherian (Mitsubishi Electric Research Laboratories), Kuan-Chuan Peng (Mitsubishi Electric Research Laboratories), Suhas Lohit (Mitsubishi Electric Research Laboratories), Honglu Zhou (Salesforce Research), Kevin Smith (Massachusetts Institute of Technology), Tim K. Marks (Mitsubishi Electric Research Laboratories), Juan Carlos Niebles (Salesforce AI Research), Petar Veličković (Google DeepMind).
- MERL researchers will attend and present the following papers at the 2024 Advances in Neural Processing Systems (NeurIPS) Conference and Workshops.
-
NEWS MERL Papers and Workshops at CVPR 2024 Date: June 17, 2024 - June 21, 2024
Where: Seattle, WA
MERL Contacts: Petros T. Boufounos; Moitreya Chatterjee; Anoop Cherian; Michael J. Jones; Toshiaki Koike-Akino; Jonathan Le Roux; Suhas Lohit; Tim K. Marks; Pedro Miraldo; Jing Liu; Kuan-Chuan Peng; Pu (Perry) Wang; Ye Wang; Matthew Brand
Research Areas: Artificial Intelligence, Computational Sensing, Computer Vision, Machine Learning, Speech & AudioBrief- MERL researchers are presenting 5 conference papers, 3 workshop papers, and are co-organizing two workshops at the CVPR 2024 conference, which will be held in Seattle, June 17-21. CVPR is one of the most prestigious and competitive international conferences in computer vision. Details of MERL contributions are provided below.
CVPR Conference Papers:
1. "TI2V-Zero: Zero-Shot Image Conditioning for Text-to-Video Diffusion Models" by H. Ni, B. Egger, S. Lohit, A. Cherian, Y. Wang, T. Koike-Akino, S. X. Huang, and T. K. Marks
This work enables a pretrained text-to-video (T2V) diffusion model to be additionally conditioned on an input image (first video frame), yielding a text+image to video (TI2V) model. Other than using the pretrained T2V model, our method requires no ("zero") training or fine-tuning. The paper uses a "repeat-and-slide" method and diffusion resampling to synthesize videos from a given starting image and text describing the video content.
Paper: https://www.merl.com/publications/TR2024-059
Project page: https://merl.com/research/highlights/TI2V-Zero
2. "Long-Tailed Anomaly Detection with Learnable Class Names" by C.-H. Ho, K.-C. Peng, and N. Vasconcelos
This work aims to identify defects across various classes without relying on hard-coded class names. We introduce the concept of long-tailed anomaly detection, addressing challenges like class imbalance and dataset variability. Our proposed method combines reconstruction and semantic modules, learning pseudo-class names and utilizing a variational autoencoder for feature synthesis to improve performance in long-tailed datasets, outperforming existing methods in experiments.
Paper: https://www.merl.com/publications/TR2024-040
3. "Gear-NeRF: Free-Viewpoint Rendering and Tracking with Motion-aware Spatio-Temporal Sampling" by X. Liu, Y-W. Tai, C-T. Tang, P. Miraldo, S. Lohit, and M. Chatterjee
This work presents a new strategy for rendering dynamic scenes from novel viewpoints. Our approach is based on stratifying the scene into regions based on the extent of motion of the region, which is automatically determined. Regions with higher motion are permitted a denser spatio-temporal sampling strategy for more faithful rendering of the scene. Additionally, to the best of our knowledge, ours is the first work to enable tracking of objects in the scene from novel views - based on the preferences of a user, provided by a click.
Paper: https://www.merl.com/publications/TR2024-042
4. "SIRA: Scalable Inter-frame Relation and Association for Radar Perception" by R. Yataka, P. Wang, P. T. Boufounos, and R. Takahashi
Overcoming the limitations on radar feature extraction such as low spatial resolution, multipath reflection, and motion blurs, this paper proposes SIRA (Scalable Inter-frame Relation and Association) for scalable radar perception with two designs: 1) extended temporal relation, generalizing the existing temporal relation layer from two frames to multiple inter-frames with temporally regrouped window attention for scalability; and 2) motion consistency track with a pseudo-tracklet generated from observational data for better object association.
Paper: https://www.merl.com/publications/TR2024-041
5. "RILA: Reflective and Imaginative Language Agent for Zero-Shot Semantic Audio-Visual Navigation" by Z. Yang, J. Liu, P. Chen, A. Cherian, T. K. Marks, J. L. Roux, and C. Gan
We leverage Large Language Models (LLM) for zero-shot semantic audio visual navigation. Specifically, by employing multi-modal models to process sensory data, we instruct an LLM-based planner to actively explore the environment by adaptively evaluating and dismissing inaccurate perceptual descriptions.
Paper: https://www.merl.com/publications/TR2024-043
CVPR Workshop Papers:
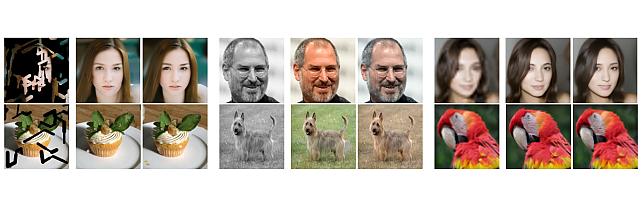
1. "CoLa-SDF: Controllable Latent StyleSDF for Disentangled 3D Face Generation" by R. Dey, B. Egger, V. Boddeti, Y. Wang, and T. K. Marks
This paper proposes a new method for generating 3D faces and rendering them to images by combining the controllability of nonlinear 3DMMs with the high fidelity of implicit 3D GANs. Inspired by StyleSDF, our model uses a similar architecture but enforces the latent space to match the interpretable and physical parameters of the nonlinear 3D morphable model MOST-GAN.
Paper: https://www.merl.com/publications/TR2024-045
2. “Tracklet-based Explainable Video Anomaly Localization” by A. Singh, M. J. Jones, and E. Learned-Miller
This paper describes a new method for localizing anomalous activity in video of a scene given sample videos of normal activity from the same scene. The method is based on detecting and tracking objects in the scene and estimating high-level attributes of the objects such as their location, size, short-term trajectory and object class. These high-level attributes can then be used to detect unusual activity as well as to provide a human-understandable explanation for what is unusual about the activity.
Paper: https://www.merl.com/publications/TR2024-057
MERL co-organized workshops:
1. "Multimodal Algorithmic Reasoning Workshop" by A. Cherian, K-C. Peng, S. Lohit, M. Chatterjee, H. Zhou, K. Smith, T. K. Marks, J. Mathissen, and J. Tenenbaum
Workshop link: https://marworkshop.github.io/cvpr24/index.html
2. "The 5th Workshop on Fair, Data-Efficient, and Trusted Computer Vision" by K-C. Peng, et al.
Workshop link: https://fadetrcv.github.io/2024/
3. "SuperLoRA: Parameter-Efficient Unified Adaptation for Large Vision Models" by X. Chen, J. Liu, Y. Wang, P. Wang, M. Brand, G. Wang, and T. Koike-Akino
This paper proposes a generalized framework called SuperLoRA that unifies and extends different variants of low-rank adaptation (LoRA). Introducing new options with grouping, folding, shuffling, projection, and tensor decomposition, SuperLoRA offers high flexibility and demonstrates superior performance up to 10-fold gain in parameter efficiency for transfer learning tasks.
Paper: https://www.merl.com/publications/TR2024-062
- MERL researchers are presenting 5 conference papers, 3 workshop papers, and are co-organizing two workshops at the CVPR 2024 conference, which will be held in Seattle, June 17-21. CVPR is one of the most prestigious and competitive international conferences in computer vision. Details of MERL contributions are provided below.
See All News & Events for Tim -
-
Awards
-
AWARD MERL Researchers win Best Paper Award at ICCV 2019 Workshop on Statistical Deep Learning in Computer Vision Date: October 27, 2019
Awarded to: Abhinav Kumar, Tim K. Marks, Wenxuan Mou, Chen Feng, Xiaoming Liu
MERL Contact: Tim K. Marks
Research Areas: Artificial Intelligence, Computer Vision, Machine LearningBrief- MERL researcher Tim Marks, former MERL interns Abhinav Kumar and Wenxuan Mou, and MERL consultants Professor Chen Feng (NYU) and Professor Xiaoming Liu (MSU) received the Best Oral Paper Award at the IEEE/CVF International Conference on Computer Vision (ICCV) 2019 Workshop on Statistical Deep Learning in Computer Vision (SDL-CV) held in Seoul, Korea. Their paper, entitled "UGLLI Face Alignment: Estimating Uncertainty with Gaussian Log-Likelihood Loss," describes a method which, given an image of a face, estimates not only the locations of facial landmarks but also the uncertainty of each landmark location estimate.
-
-
Research Highlights
-
MERL Publications
- , "Multimodal Diffusion Bridge with Attention-Based SAR Fusion for Satellite Image Cloud Removal", arXiv, April 2025.
- , "Recovering Pulse Waves from Video Using Deep Unrolling and Deep Equilibrium Models", arXiv, March 2025.BibTeX arXiv
- @article{Shenoy2025mar,
- author = {Shenoy, Vineet and Lohit, Suhas and Mansour, Hassan and Chellappa, Rama and Marks, Tim K.},
- title = {{Recovering Pulse Waves from Video Using Deep Unrolling and Deep Equilibrium Models}},
- journal = {arXiv},
- year = 2025,
- month = mar,
- url = {https://arxiv.org/abs/2503.17269}
- }
- , "Time-Series U-Net with Recurrence for Noise-Robust Imaging Photoplethysmography", arXiv, March 2025.BibTeX arXiv
- @article{Shenoy2025mar2,
- author = {Shenoy, Vineet and Wu, Shaoju and Comas, Armand and Marks, Tim K. and Lohit, Suhas and Mansour, Hassan},
- title = {{Time-Series U-Net with Recurrence for Noise-Robust Imaging Photoplethysmography}},
- journal = {arXiv},
- year = 2025,
- month = mar,
- url = {https://arxiv.org/abs/2503.17351}
- }
- , "Rotation-Equivariant Neural Networks for Cloud Removal from Satellite Images", Asilomar Conference on Signals, Systems, and Computers (ACSSC), DOI: 10.1109/IEEECONF60004.2024.10942613, January 2025, pp. 1360-1365.BibTeX TR2025-009 PDF
- @inproceedings{Lohit2025jan,
- author = {Lohit, Suhas and Marks, Tim K.},
- title = {{Rotation-Equivariant Neural Networks for Cloud Removal from Satellite Images}},
- booktitle = {2024 58th Asilomar Conference on Signals, Systems, and Computers (ACSSC)},
- year = 2025,
- pages = {1360--1365},
- month = jan,
- publisher = {IEEE},
- doi = {10.1109/IEEECONF60004.2024.10942613},
- issn = {2576-2303},
- isbn = {979-8-3503-5405-8},
- url = {https://www.merl.com/publications/TR2025-009}
- }
- , "Few-shot Transparent Instance Segmentation for Bin Picking", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), September 2024, pp. 5009-5016.BibTeX TR2024-127 PDF Video
- @inproceedings{Cherian2024sep,
- author = {Cherian, Anoop and Jain, Siddarth and Marks, Tim K.},
- title = {{Few-shot Transparent Instance Segmentation for Bin Picking}},
- booktitle = {2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
- year = 2024,
- pages = {5009--5016},
- month = sep,
- publisher = {IEEE},
- url = {https://www.merl.com/publications/TR2024-127}
- }
-
Other Publications
- , "Gamma-SLAM: Visual SLAM in unstructured environments using variance grid maps", Journal of Field Robotics, Vol. 26, No. 1, pp. 26-51, 2009.BibTeX
- @Article{marks2009gamma,
- author = {Marks, Tim K and Howard, Andrew and Bajracharya, Max and Cottrell, Garrison W and Matthies, Larry H},
- title = {Gamma-SLAM: Visual SLAM in unstructured environments using variance grid maps},
- journal = {Journal of Field Robotics},
- year = 2009,
- volume = 26,
- number = 1,
- pages = {26--51},
- publisher = {Wiley Online Library}
- }
- , "NIMBLE: A kernel density model of saccade-based visual memory", Journal of Vision, Vol. 8, No. 14, 2008.BibTeX
- @Article{barrington2008nimble,
- author = {Barrington, Luke and Marks, Tim K and Hsiao, Janet Hui-wen and Cottrell, Garrison W},
- title = {NIMBLE: A kernel density model of saccade-based visual memory},
- journal = {Journal of Vision},
- year = 2008,
- volume = 8,
- number = 14,
- publisher = {Association for Research in Vision and Ophthalmology}
- }
- , "Gamma-SLAM: Using stereo vision and variance grid maps for SLAM in unstructured environments", Robotics and Automation, 2008. ICRA 2008. IEEE International Conference on, 2008, pp. 3717-3724.BibTeX
- @Inproceedings{marks2008gamma,
- author = {Marks, Tim K and Howard, Andrew and Bajracharya, Max and Cottrell, Garrison W and Matthies, Larry},
- title = {Gamma-SLAM: Using stereo vision and variance grid maps for SLAM in unstructured environments},
- booktitle = {Robotics and Automation, 2008. ICRA 2008. IEEE International Conference on},
- year = 2008,
- pages = {3717--3724},
- organization = {IEEE}
- }
- , "SUN: A Bayesian framework for saliency using natural statistics", Journal of Vision, Vol. 8, No. 7, 2008.BibTeX
- @Article{zhang2008sun,
- author = {Zhang, Lingyun and Tong, Matthew H and Marks, Tim K and Shan, Honghao and Cottrell, Garrison W},
- title = {SUN: A Bayesian framework for saliency using natural statistics},
- journal = {Journal of Vision},
- year = 2008,
- volume = 8,
- number = 7,
- publisher = {Association for Research in Vision and Ophthalmology}
- }
- , "Gamma-SLAM: Stereo visual SLAM in unstructured environments using variance grid maps", IROS visual SLAM workshop, 2007.BibTeX
- @Article{marks2007gamma,
- author = {Marks, Tim K and Howard, Andrew and Bajracharya, Max and Cottrell, Garrison W and Matthies, Larry},
- title = {Gamma-SLAM: Stereo visual SLAM in unstructured environments using variance grid maps},
- journal = {IROS visual SLAM workshop},
- year = 2007,
- publisher = {Citeseer}
- }
- , "Joint tracking of pose, expression, and texture using conditionally Gaussian filters", Advances in neural information processing systems, Vol. 17, pp. 889-896, 2005.BibTeX
- @Article{marks2005joint,
- author = {Marks, Tim K and Hershey, John and Roddey, J Cooper and Movellan, Javier R},
- title = {Joint tracking of pose, expression, and texture using conditionally Gaussian filters},
- journal = {Advances in neural information processing systems},
- year = 2005,
- volume = 17,
- pages = {889--896}
- }
- , "3d tracking of morphable objects using conditionally gaussian nonlinear filters", Computer Vision and Pattern Recognition Workshop, 2004. CVPRW'04. Conference on, 2004, pp. 190-190.BibTeX
- @Inproceedings{marks20043d,
- author = {Marks, Tim K and Hershey, John and Roddey, J Cooper and Movellan, Javier R},
- title = {3d tracking of morphable objects using conditionally gaussian nonlinear filters},
- booktitle = {Computer Vision and Pattern Recognition Workshop, 2004. CVPRW'04. Conference on},
- year = 2004,
- pages = {190--190},
- organization = {IEEE}
- }
- , "Diffusion networks, products of experts, and factor analysis", Proc. Int. Conf. on Independent Component Analysis, pp. 481-485, 2001.BibTeX
- @Article{marks2001diffusion,
- author = {Marks, Tim K and Movellan, Javier R},
- title = {Diffusion networks, products of experts, and factor analysis},
- journal = {Proc. Int. Conf. on Independent Component Analysis},
- year = 2001,
- pages = {481--485},
- publisher = {Citeseer}
- }
- , "Gamma-SLAM: Visual SLAM in unstructured environments using variance grid maps", Journal of Field Robotics, Vol. 26, No. 1, pp. 26-51, 2009.
-
Software & Data Downloads
-
Videos
-
MERL Issued Patents
-
Title: "System and Method for Remote Measurements of Vital Signs of a Person in a Volatile Environment"
Inventors: Marks, Tim; Mansour, Hassan; Nowara, Ewa; Nakamura, Yudai; Veeraraghavan, Ashok N.
Patent No.: 12,056,879
Issue Date: Aug 6, 2024 -
Title: "System and Method for Manipulating Two-Dimensional (2D) Images of Three-Dimensional (3D) Objects"
Inventors: Marks, Tim; Medin, Safa; Cherian, Anoop; Wang, Ye
Patent No.: 11,663,798
Issue Date: May 30, 2023 -
Title: "InSeGAN: A Generative Approach to Instance Segmentation in Depth Images"
Inventors: Cherian, Anoop; Pais, Goncalo; Marks, Tim; Sullivan, Alan
Patent No.: 11,651,497
Issue Date: May 16, 2023 -
Title: "Method and System for Scene-Aware Interaction"
Inventors: Hori, Chiori; Cherian, Anoop; Chen, Siheng; Marks, Tim; Le Roux, Jonathan; Hori, Takaaki; Harsham, Bret A.; Vetro, Anthony; Sullivan, Alan
Patent No.: 11,635,299
Issue Date: Apr 25, 2023 -
Title: "Scene-Aware Video Encoder System and Method"
Inventors: Cherian, Anoop; Hori, Chiori; Le Roux, Jonathan; Marks, Tim; Sullivan, Alan
Patent No.: 11,582,485
Issue Date: Feb 14, 2023 -
Title: "Low-latency Captioning System"
Inventors: Hori, Chiori; Hori, Takaaki; Cherian, Anoop; Marks, Tim; Le Roux, Jonathan
Patent No.: 11,445,267
Issue Date: Sep 13, 2022 -
Title: "System and Method for a Dialogue Response Generation System"
Inventors: Hori, Chiori; Cherian, Anoop; Marks, Tim; Hori, Takaaki
Patent No.: 11,264,009
Issue Date: Mar 1, 2022 -
Title: "System and Method for Remote Measurements of Vital Signs"
Inventors: Marks, Tim; Mansour, Hassan; Nowara, Ewa; Nakamura, Yudai; Veeraraghavan, Ashok N.
Patent No.: 11,259,710
Issue Date: Mar 1, 2022 -
Title: "Image Processing System and Method for Landmark Location Estimation with Uncertainty"
Inventors: Marks, Tim; Kumar, Abhinav; Mou, Wenxuan; Feng, Chen; Liu, Xiaoming
Patent No.: 11,127,164
Issue Date: Sep 21, 2021 -
Title: "Method and System for Determining 3D Object Poses and Landmark Points using Surface Patches"
Inventors: Jones, Michael J.; Marks, Tim; Papazov, Chavdar
Patent No.: 10,515,259
Issue Date: Dec 24, 2019 -
Title: "Method and System for Multi-Modal Fusion Model"
Inventors: Hori, Chiori; Hori, Takaaki; Hershey, John R.; Marks, Tim
Patent No.: 10,417,498
Issue Date: Sep 17, 2019 -
Title: "Method and System for Detecting Actions in Videos"
Inventors: Jones, Michael J.; Marks, Tim; Tuzel, Oncel; Singh, Bharat
Patent No.: 10,242,266
Issue Date: Mar 26, 2019 -
Title: "Method and System for Detecting Actions in Videos using Contour Sequences"
Inventors: Jones, Michael J.; Marks, Tim; Kulkarni, Kuldeep
Patent No.: 10,210,391
Issue Date: Feb 19, 2019 -
Title: "Method for Estimating Locations of Facial Landmarks in an Image of a Face using Globally Aligned Regression"
Inventors: Tuzel, Oncel; Marks, Tim; Tambe, Salil
Patent No.: 9,633,250
Issue Date: Apr 25, 2017 -
Title: "Method for Generating Representations Polylines Using Piecewise Fitted Geometric Primitives"
Inventors: Brand, Matthew E.; Marks, Tim; MV, Rohith
Patent No.: 9,613,443
Issue Date: Apr 4, 2017 -
Title: "Method for Determining Similarity of Objects Represented in Images"
Inventors: Jones, Michael J.; Marks, Tim; Ahmed, Ejaz
Patent No.: 9,436,895
Issue Date: Sep 6, 2016 -
Title: "Method for Detecting 3D Geometric Boundaries in Images of Scenes Subject to Varying Lighting"
Inventors: Marks, Tim; Tuzel, Oncel; Porikli, Fatih M.; Thornton, Jay E.; Ni, Jie
Patent No.: 9,418,434
Issue Date: Aug 16, 2016 -
Title: "Method for Factorizing Images of a Scene into Basis Images"
Inventors: Tuzel, Oncel; Marks, Tim; Porikli, Fatih M.; Ni, Jie
Patent No.: 9,384,553
Issue Date: Jul 5, 2016 -
Title: "Method and System for Tracking People in Indoor Environments using a Visible Light Camera and a Low-Frame-Rate Infrared Sensor"
Inventors: Marks, Tim; Jones, Michael J.; Kumar, Suren
Patent No.: 9,245,196
Issue Date: Jan 26, 2016 -
Title: "Method for Detecting and Tracking Objects in Image Sequences of Scenes Acquired by a Stationary Camera"
Inventors: Marks, Tim; Jones, Michael J.; MV, Rohith
Patent No.: 9,213,896
Issue Date: Dec 15, 2015 -
Title: "Method and System for Segmenting Moving Objects from Images Using Foreground Extraction"
Inventors: Veeraraghavan, Ashok N.; Marks, Tim; Taguchi, Yuichi
Patent No.: 8,941,726
Issue Date: Jan 27, 2015 -
Title: "Camera-Based 3D Climate Control"
Inventors: Marks, Tim; Jones, Michael J.
Patent No.: 8,929,592
Issue Date: Jan 6, 2015 -
Title: "Method and System for Registering an Object with a Probe Using Entropy-Based Motion Selection and Rao-Blackwellized Particle Filtering"
Inventors: Taguchi, Yuichi; Marks, Tim; Hershey, John R.
Patent No.: 8,510,078
Issue Date: Aug 13, 2013 -
Title: "Localization in Industrial Robotics Using Rao-Blackwellized Particle Filtering"
Inventors: Marks, Tim; Taguchi, Yuichi
Patent No.: 8,219,352
Issue Date: Jul 10, 2012 -
Title: "Method for Synthetically Images of Objects"
Inventors: Jones, Michael J.; Marks, Tim; Kumar, Ritwik
Patent No.: 8,194,072
Issue Date: Jun 5, 2012
-
Title: "System and Method for Remote Measurements of Vital Signs of a Person in a Volatile Environment"